【C++并发编程】并发编程接口:thread、promise、packaged_task 和 async
上次系统介绍了C++的内存模型,今天接着介绍C++提供的并发编程接口。主要有下面几种方式:
1. std::thread; // #include <thread>
2. std::promise<T>; // #include <future>
3. std::packaged_task<F>; // #include <future>
4. std::async. // #include <future>
第2~4种方式都在<future>头文件中定义,这是因为它们都通过future在任务之间传输值。下面会详细介绍。
std::thread
在C++中,创建新线程开启一个新的并发任务最简单的方式就是使用std::thread:
#include <iostream>
#include <thread>
void task1 (int arg) {
printf("task%d code here...\n", arg);
}
struct task2 {
void operator()(int arg1, int arg2) {
printf("task%d code here...\n", arg1);
}
};
int main() {
std::thread t1(task1, 1);
std::thread t2(task2, 2, 3);
// NOTICE!
t1.join();
t2.join();
return 0;
}
std::thread 在构造的时候传入任何可调用体,接着转入可调用体相应的参数。注意,为了使创建的线程与主线程之间的行为正常避免相互干扰,我必须显示join或者detach新创建的线程。join的意思是等待线程执行完任务,离开其局部栈空间,类似Linux父进程等待子进程的wait(2)。detach的意思是和主线程分离,这里有许多坑要注意:
- 要保证新线程在使用主线程空间的变量时,该变量没用离开其栈空间。也就是说,主线程detach后如果离开了其栈空间,其上变量被销毁之后,新线程再访问主线程的变量会导致未定义行为;
- detach之后,如果新创建的线程有主线程的引用,还可能影响后续主线程的栈空间,表现为,其栈上的变量无缘无故就被修改。
举一个简单的例子:
#include <thread>
#include <iostream>
void f(int& ri) {
while(true) {
ri = 9;
}
}
int main() {
int i = 10;
int& ri = i;
std::thread t(f, std::ref(ri));
t.detach();
i = 100;
std::this_thread::sleep_for(std::chrono::seconds(1));
// print 9
printf("%d\n", i);
}
最终输出9,也就是说即便detach之后,新线程也可能影响主线程的行为,这是一个大坑,要注意。
我们注意到,虽然std::thread用起来直观又方便,但是如果我们想在主线程接收新线程任务的返回值,那该怎么办呢,我们可能得自己创建共享数据,还得保证线程安全和数据的同步,实在是不方便。我的意思是,如果我们想要与线程任务进行通信或者数据传输,std::thread是很麻烦的。所以有了其他并发编程接口,用来弥补std::thread在任务通信方面的不足。
本质上,要完成任务间的通信,需要在新线程创建的时候让线程库给我们添加一个共享的状态,主线程和新线程通过这个共享状态的句柄进行通信。主线程下,这个句柄就是future,新线程下,这个句柄就是promise
future 和 promise
为了完成任务间的通信,任务所在线程将结果放入promise,需要这一结果的线程就从该任务对应的future上进行提取,如图:
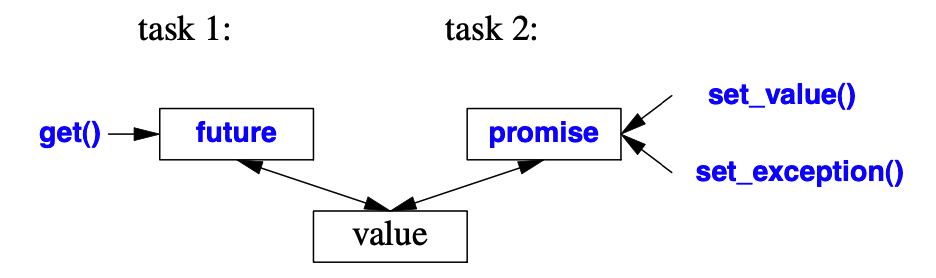
这里的value就是task1线程和task2线程间的一个共享状态。task2通过set_value()或set_exception()传递值,task1通过get()获得值。简单的示例代码:
#include <thread>
#include <iostream>
#include <future>
void f(std::promise<int> prom) {
prom.set_value(5);
}
int main() {
std::promise<int> prom;
std::future<int> fut = prom.get_future();
std::thread t(f, std::move(prom));
// print 5
printf("%d\n", fut.get());
t.join();
return 0;
}
上面代码打印数值5,完成了一次任务线程间的信息通信。
packaged_task
本质上,packaged_task就是对future和promise的一层封装,用于简化任务线程间信息通信。如图:
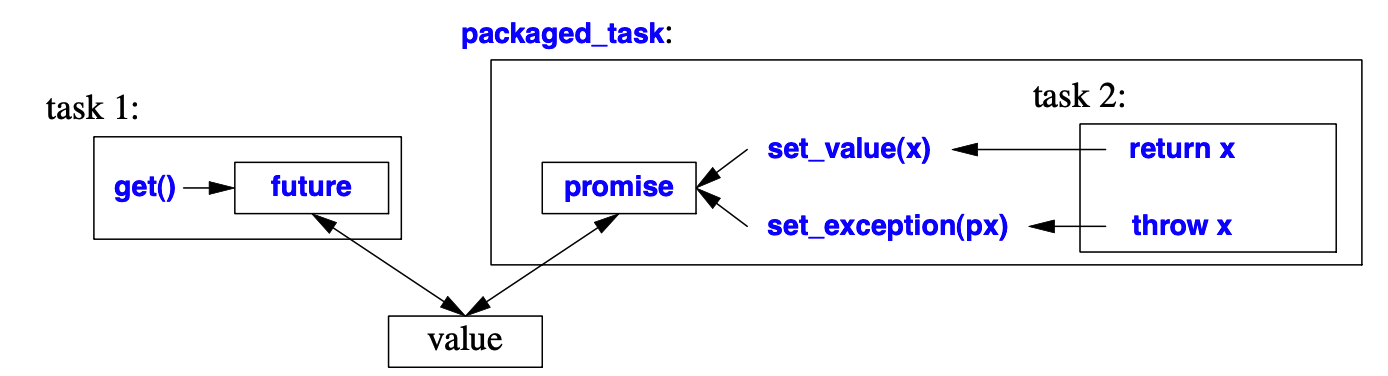 也就是说一个packaged_task,就像下面这样执行任务:
也就是说一个packaged_task,就像下面这样执行任务:
// int f (args);
// promise<int> pr;
try {
pr.set_value(f(args));
} catch {
pr.set_exception(current_exception());
}
简单示例代码如下:
#include <thread>
#include <iostream>
#include <future>
int f(int arg) {
return arg + 1;
}
int main() {
std::packaged_task<int(int)> task(f);
std::future<int> fut = task.get_future();
std::thread t(std::move(task), 4);
printf("%d\n", fut.get());
t.join();
return 0;
}
上述代码输出5。可以看到,主线程可以得到其他线程任务的返回值。
async
通过packaged_task可以获取其他并行任务的返回值,即在其他线程调用任务,而在主线程获取任务的结果。async同样可以做到这一目的,不同的是,通过async运行任务不需要自己手动创建新线程,async通过线程库根据当前系统资源情况创建线程运行任务,返回一个future。也可以选择不创建,在调用future的get接口时在同一个线程运行任务。async到底创不创建线程由当前系统情况和线程库决定。示例代码如下:
#include <thread>
#include <iostream>
#include <future>
int f(int arg) {
return arg + 1;
}
int main() {
auto fut = std::async(f, 4);
printf("%d\n", fut.get());
return 0;
}
上述代码同样输出5。
当然我们也可以手动指定让async创建新线程运行任务:
auto fut = std::async(std::launch::async, f, 4);
总结
可以看到,C++提供的几种并发接口均有自己适用的场景,如果任务间没有联系,就直接使用std::thread。如果需要任务间传输数据,应配合使用promise或packaged_task,然后用future获取结果。如果想要让系统灵活决定要不要创建新线程运行任务,可以直接使用std::async。这些接口越来越上层,用起来越来越方便。